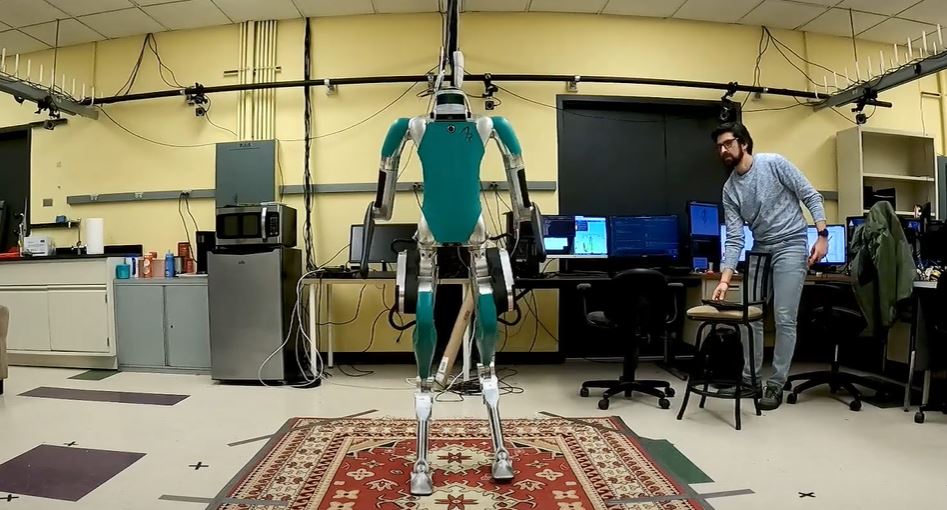
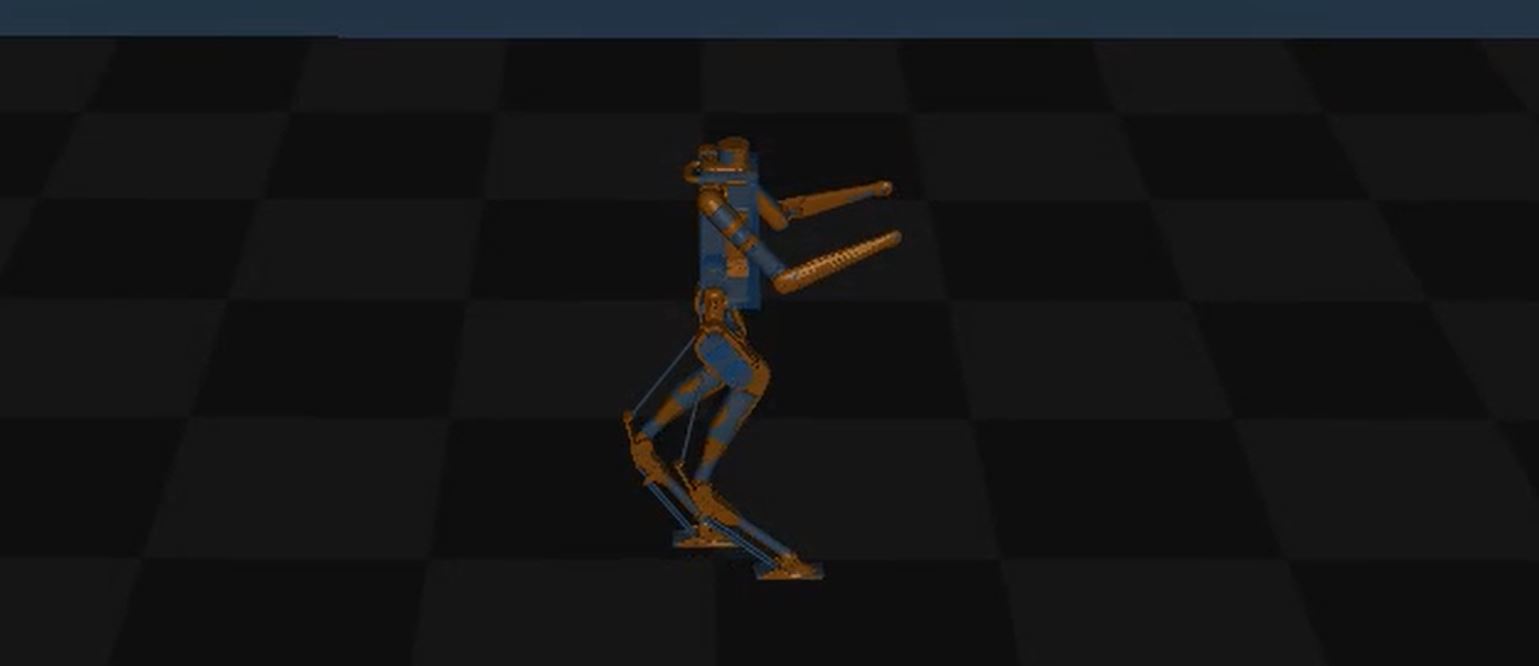
3D LIPM-based Stepping Hardware Testing
The 3D Linear Inverted Pendulum Model based stepping controller is tested on hardware.
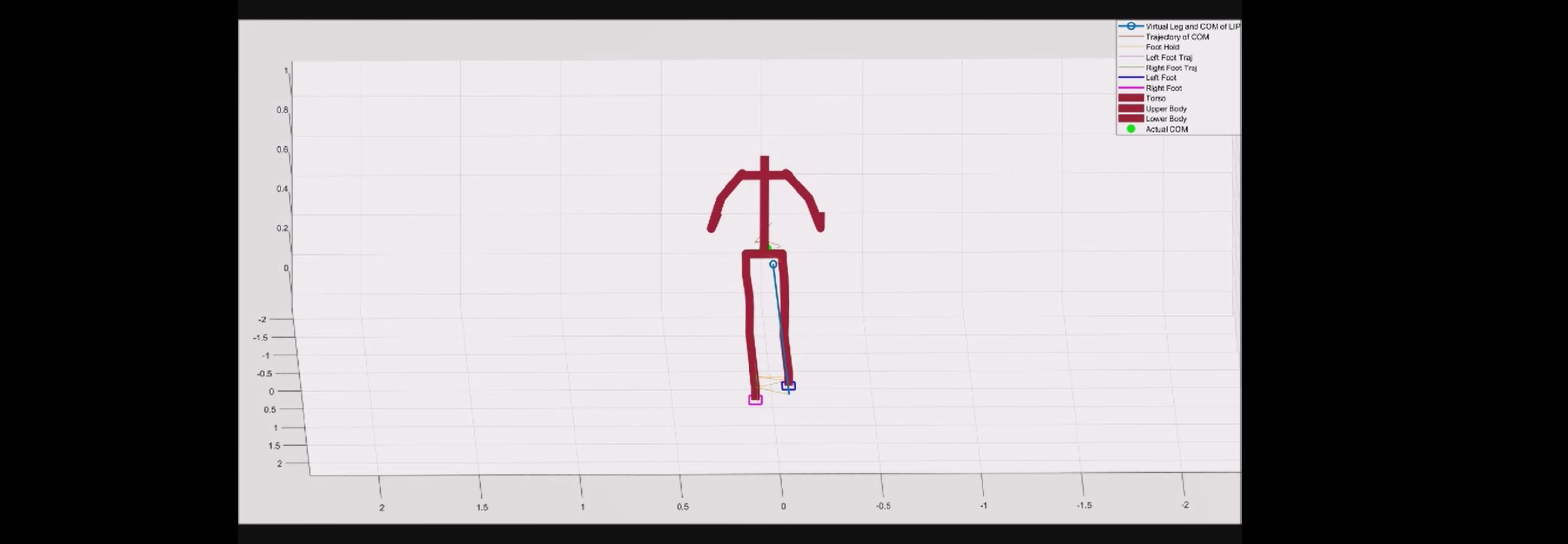
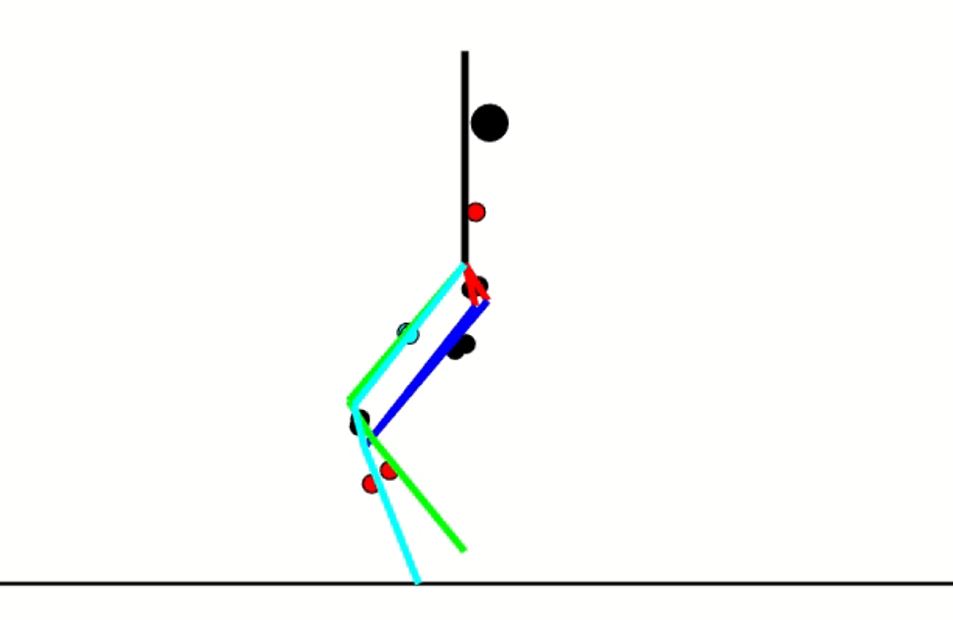
2D Approximation of the step-to-step map
A data-driven model-based approach to walking control of Digit in 2D using MuJoCo.
Dynamic Walking 2022 Presentation
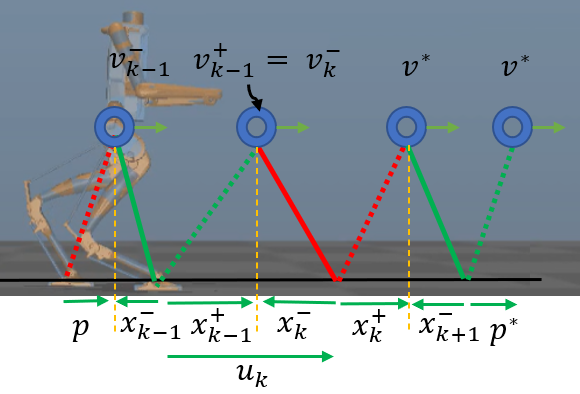
Using a Linear Inverted Pendulum Model to Design a Stepping Controller for Digit
Linear inverted pendulum modeling applied to Digit walking control
A walking controller using the concepts of orbital mechanics and the inverted pendulum dynamics.
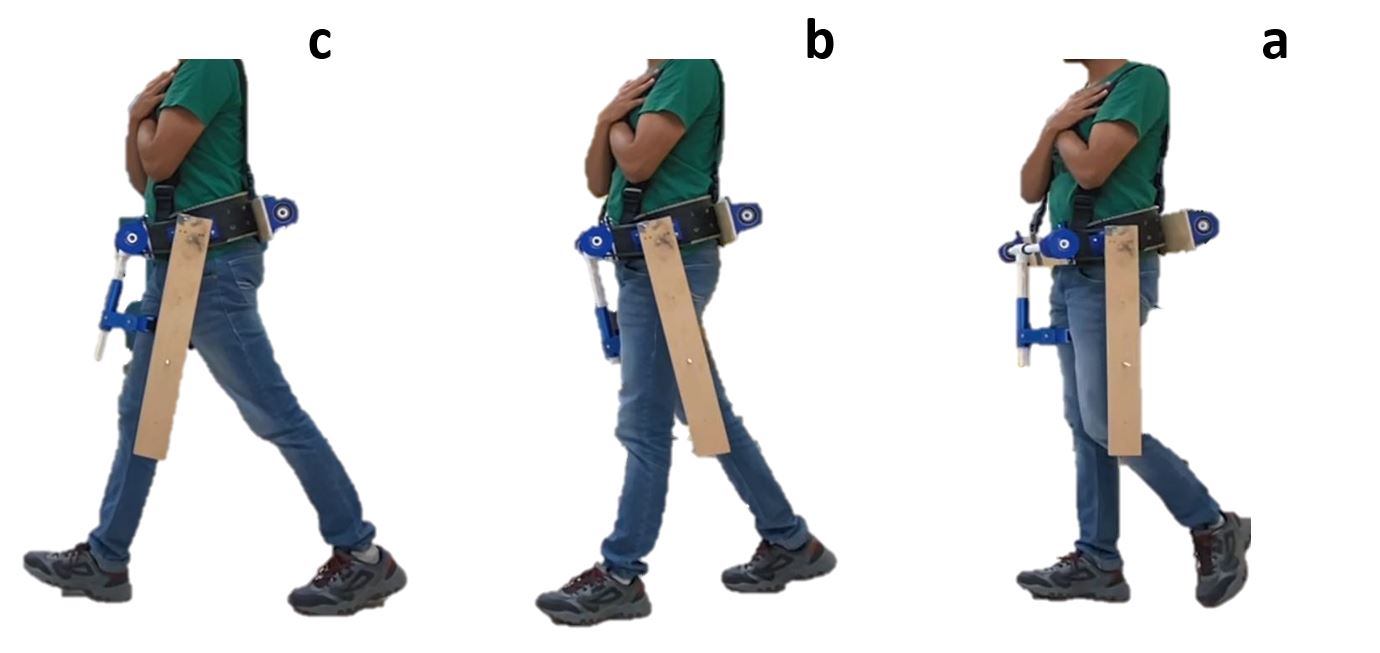
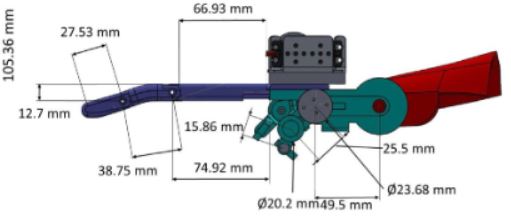
Passive Swinging-Arms Exoskeleton for Angular Momentum Reduction
A device that couples leg swing to artificial-arm swinging to reduce vertical angular momentum.
Digit Cyclic Stability in Mujoco Simulation
Cyclic gait achieved using control partitioning in Mujoco
In the news: American Heart Association Predoctoral Fellowship
A two year fellowship to support my research in human-inspired control for rehabilitation and robotics
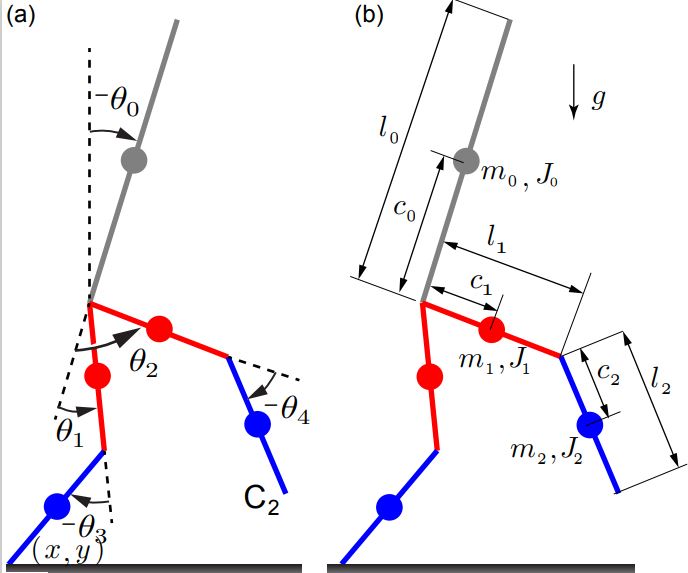
2D Walking Model and Control of Digit
A 2D model of the humanoid Digit was developed and controls were tested using MATLAB
Control of a 5-Link Biped Using Quadratic Polynomial
To walk over constrained environments, bipedal robots must meet concise control objectives of speed and foot placement.
Bioinspired robotic exoskeleton for endotracheal intubation
A novel method to intubate under ubstructed airway conditions.

In the news: NSF Innovation CORPS
Recognized as the Entrepreneurial Lead of the iCORPS program at the Innovation Awards

Variable Stiffness Treadmill
Design and experimental setup of a treadmill capable of changing the ground stiffness in an online manner

Low Cost Myoelectric Prosthetic Hand
Design and development of a low-cost 3D printed prosthetic hand for wrist disarticulation with up to 10 programable gestures.
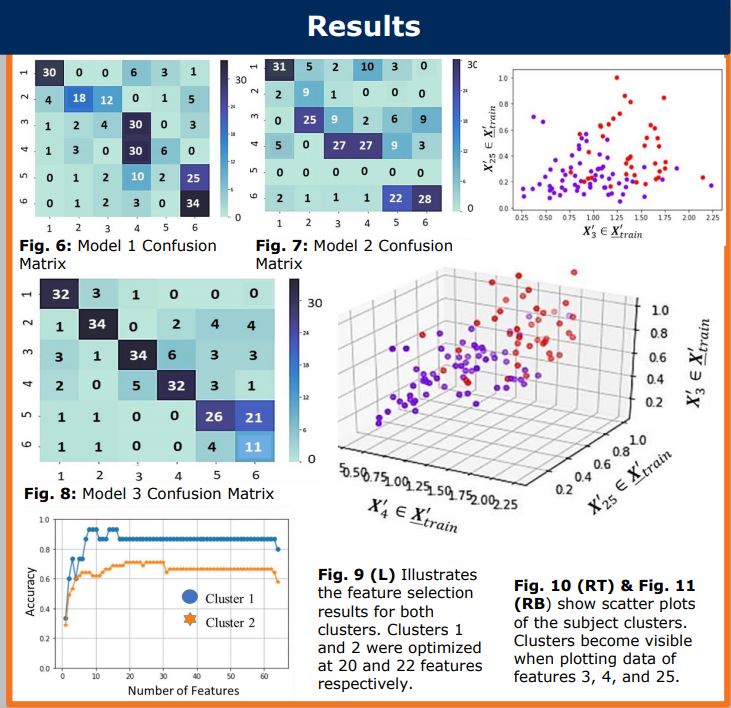
Hierarchical Clustering and KNN in EMG Pattern Recognition
Machine learning techniquies used to predict user gesture intent using the Myo Armband